Power and VESC
General
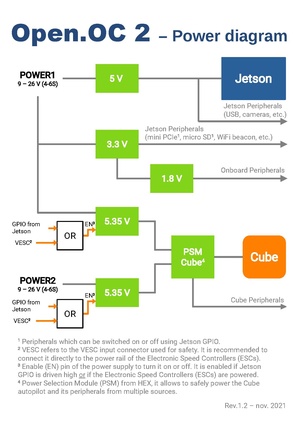
The Open.OC 2 power system is designed with redundancy in mind. A general description of the power system and its features are given below:
- The board has two power inputs, we recommend to connect them to individual power rails respecting the voltage limits (9-26 V).
- The board has four main voltage regulators, two (for redundancy) of which are used to feed the Cube, one is used to power the Jetson module, and one is used for the peripherals.
- The regulators all use different hardware to prevent common failure modes.
- The Jetson and peripheral regulators are "always-on", meaning that their power rail are powered when a power source is connected to power input J34.
- The Cube regulators can be controlled through the Jetson, but are protected against accidental disabling through VESC (see below).
Cube power safety - VESC and power monitoring
The Cube power supply is highly critical for safe operation (especially for flying vehicles), and is therefore designed to be both redundant and protected against accidental disabling.
Redundancy
The redundancy is achieved through dual power input (to be connected to individual power sources by the user), and completely separate power regulation to provide 5.35 V for the Cube. This regulation is done with different hardware for both power inputs, to eliminate common unforeseen failure modes: If an unexpected fault occurs the system is designed such that only one of the two power supplies is affected and the vehicle can move to a safe state (such as landing).
VESC
The power supplies for the Cube autopilot can be controlled by the Jetson module. This gives the user the option to turn off the Cube when it is not in use, but also to turn it on well before use so that the Cube can go through a proper warm-up. Such warm-up increased the accuracy of the inertial navigation sensors on the Cube, and it can be monitored and controlled by most autopilot software such as ArduPilot. To eliminate the risk of an inadvertent cut-off of power to the Cube, the Open.OC 2 board included an extra protection through the connector VESC. This connector must be connected to the power rail (9-26 V) powering the Electronic Speed Controllers (ESCs) controlled by the autopilot. When done, the power to the Cube cannot be switched off when the ESCs are powered and the drone is potentially in flight. This interlock is provided through hardware components on the board, to completely exclude the possibility that any software error/crash on the Jetson module can disable the Cube in flight.
Power monitoring
In addition, the Open.OC 2 board provides power monitoring for all voltage rails. This is done through two TI ADS1015s that are present on i2c0 (see Serial peripherals) on I2C-addresses 0x48 and 0x49. The power rail assignments and gains are given below:
| Port | V Rail | Gain |
|---|---|---|
| AIN0 | Cube 5V backup | 0.5x |
| AIN1 | Cube 5V main | 0.5x |
| AIN2 | VESC | 0.118x |
| AIN3 | AIN_SPARE | 1x |
| Port | V Rail | Gain |
|---|---|---|
| AIN0 | Vin (9-26 V) | 0.118x |
| AIN1 | 5V | 0.5x |
| AIN2 | 3.3V | 0.5x |
| AIN3 | 1.8V | 1x |