Difference between revisions of "Specifications"
Jump to navigation
Jump to search
Joost.Weijs (talk | contribs) |
Joost.Weijs (talk | contribs) |
||
| Line 6: | Line 6: | ||
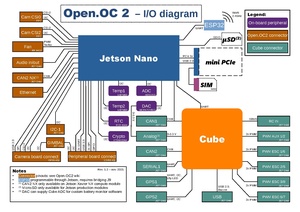
[[File:Io-diagram.pdf|thumb]] | [[File:Io-diagram.pdf|thumb]] | ||
| − | |||
* '''Compute module''': Compatible with Nvidia Jetson Nano, Jetson Nano 2 GB, Jetson TX2 Nano, Jetson Xavier NX | * '''Compute module''': Compatible with Nvidia Jetson Nano, Jetson Nano 2 GB, Jetson TX2 Nano, Jetson Xavier NX | ||
* '''Flight controller''': Plugin compatible with Pixhawk Cube, contains all connections present on a standard Pixhawk carrier board, see below | * '''Flight controller''': Plugin compatible with Pixhawk Cube, contains all connections present on a standard Pixhawk carrier board, see below | ||
| Line 26: | Line 25: | ||
(3) - Follows the Pixhawk connector standard DS-009: https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf<br> | (3) - Follows the Pixhawk connector standard DS-009: https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf<br> | ||
(4) - Can be used to send out WiFi beacon frames to comply with French drone law (REFREFRED). Firmware can be updated through compute module | (4) - Can be used to send out WiFi beacon frames to comply with French drone law (REFREFRED). Firmware can be updated through compute module | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
Revision as of 15:53, 18 October 2021
Specifications
{kind=link}
- Compute module: Compatible with Nvidia Jetson Nano, Jetson Nano 2 GB, Jetson TX2 Nano, Jetson Xavier NX
- Flight controller: Plugin compatible with Pixhawk Cube, contains all connections present on a standard Pixhawk carrier board, see below
- Vision: 2x 2-lane CSI-2, 1x 4-lane CSI-2, 1x USB 2.0
- Power supply: Double redundant, supports 9 V - 28 V input
- Safety: Voltage monitoring for all power rails, 2 on-board temperature sensors
- Storage: µSD-card slot (1)
- Mini PCI-Express: 1x mPCIe slot, e.g. for 4G/5G module, WiFi module, etc.
- External communication interfaces compute module: Ethernet 10/100/1000 BASE-T, UART, CANBus(2),
- External Flight controller interfaces(3): 3x UART, 2x CAN, ADC (for current and voltage sensing), USB, Buzzer, 14x PWM, Buzzer
- Communication interfaces compute module <-> flight controller: UART, CANBus, USB
- Communication interfaces with daughterboard: USB 3.0, I2C, SPI, UART
- Integrated WiFi Beacon: ESP-WROOM-02 Wifi module(4)
- Misc onboard peripherals: Real-Time Clock, Crypto Element (secure key storage)
(1) - In addition to storage on the compute module. Not supported in combination with Jetson Nano Evaluation compute module (P3448-0000)
(2) - 1x CANBus controller&transceiver provided on carrier board, flight controller is also on this CANBus. For Jetson Xavier NX the CAN controller embedded on the module is connected to an additional transceiver, providing an additional CANBus connection for this module.
(3) - Follows the Pixhawk connector standard DS-009: https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-009%20Pixhawk%20Connector%20Standard.pdf
(4) - Can be used to send out WiFi beacon frames to comply with French drone law (REFREFRED). Firmware can be updated through compute module